-
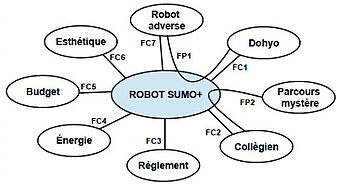
Voici ci-dessous un diagramme "pieuvre" qui permet d'énoncer les éléments extérieurs en relation avec l'objet technique :

FP1: POUSSER le robot adverse hors du dohyo.
FP2: EFFECTUER le parcours mystère sous le pilotage d'un collégien.
FC1: NE PAS DETERIORER la surface plane.
FC2: CONSTRUIRE le robot.
FC3: RESPECTER le règlement et les dimensions.
FC4: DISPOSER de sa propre source en énergie.
FC5: ETRE compétitif par rapport au budget.
FC6: ETRE esthétique.
FC7: RESISTER aux attaques du robot adverse.
Lina, Aicha et Sacha.
-
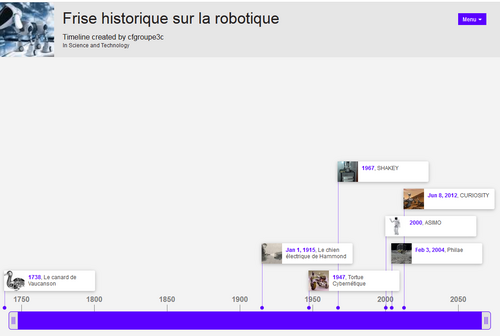
https://www.timetoast.com/timelines/1906608
-
-
Pour assurer la mobilité des robots sur le sol, il existe quatre familles de solutions techniques possibles:
- Les roues : Par exemple, les trois roues. Leur configuration classique est de disposer les roues en triangle isocèle, ce qui garantie leur stabilité. Il y a également les six roues qui grâce à leurs roues proches sont très stables.
- Les pattes : Par exemple, les quatre pattes ou encore les six pattes, la stabilité est meilleure avec un nombre de pattes plus grand. Les six pattes ont une très grande stabilité car trois de leurs pattes (au moins) reposent en
permanence sur le sol.- Les chenilles : Elles sont reconnues pour leur stabilité sur les sols boueux, sableux, manquant de fermeté ou quand les obstacles sont trop imposants. Elles sont aussi capables de monter de fortes pentes.
- Les jambes : Elles sont parfois plus efficaces que les roues, et on leur donne logiquement deux roues comme aux êtres humains. Ce sont des robots bipèdes capables de monter des escaliers à la manière d'un homme : ils ajustent leur
position en permanence pour garder l'équilibre.Exemple de robot avec des jambes (Asimo de chez Honda) :
-
Lors de l'étude de la motorisation d'un robot, quelques critères de choix peuvent être pris en compte, comme l'effort de la poussée, la masse du robot ou encore la tension d'alimentation.
Pour motorisé un robot, trois familles de solutions techniques sont couramment utilisées :
- moteurs à courant continu,
 - moteurs pas à pas
- moteurs pas à pas - servomoteur à rotation continue
- servomoteur à rotation continue Lina et Aïcha
Lina et Aïcha


 Lina et Aïcha 3emeC
Lina et Aïcha 3emeC

|
|
|
|